材料 无人机部分
飞控开发板:STM32F411CEU6 31.9元
无刷电机:2204-2300KV 正、反齿各两个 24.8 × 4元
电调:新西达30A(无校准) 30 * 4元
机架及尺寸:XL7碳纤维,臂长7英寸 129元
螺旋桨:APC 6*4 正反桨 8 × 2 + 9
陀螺仪:MPU6050 7元
通信模块:NRF24L01天线1100米 10.4元
电压模块:INA226 18元
气压计:GY-63 30元
3S电池:2200mAh + 2800mAh 62+54.9元
控制部分
控制芯片:STM32F103C8T6 17元
通信模块:NRF24L01天线1100米 10.4元
串口模块:USB—TTL
关键技术 关键技术主要是控制无人机的稳定飞行,至于pwm驱动电调就不做探讨,因为相对比较简单。
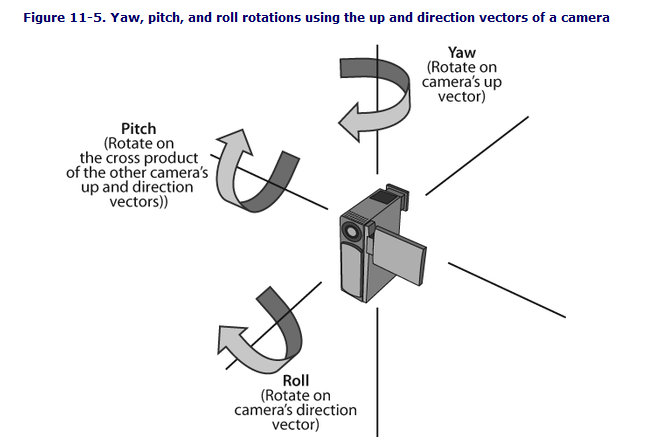
姿态解算 四元数法 欧拉角与四元数
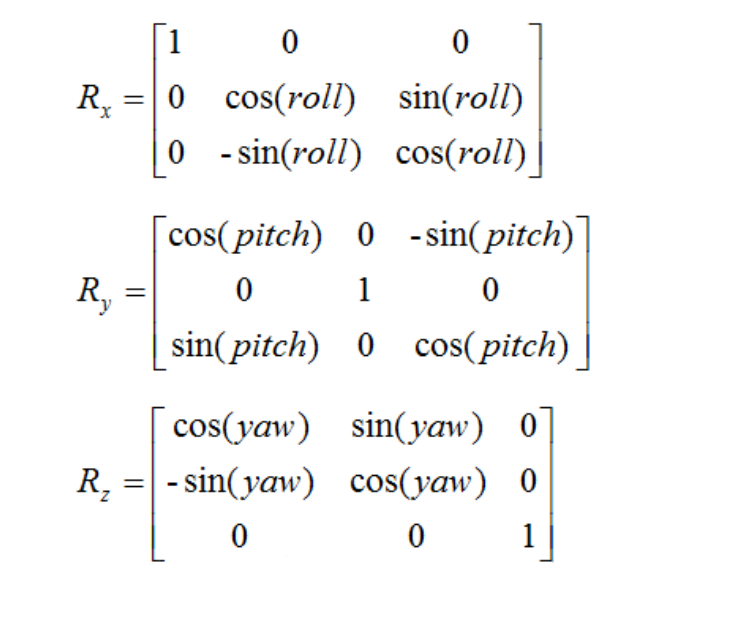
表达姿态一般通过欧拉角表示,分为俯仰角(Pitch)、横滚角(Roll)、偏航角(Yaw),旋转某一个角可以用一个旋转矩阵表示,他们可以用e的单位阵次幂进行泰勒展开逼近角度。
他们对应的三个旋转矩阵为:
我们把三个矩阵乘到一起,就可以用一个矩阵表达一个连续的变化了。这里要注意,因为矩阵没有交换律,所以先后顺序对最终结果的影响很大。
做无人机时经常会听到一个词汇叫“万向锁”,它的起因是当无人机的俯仰到垂直方向的时候,无法判断是俯仰还是横滚,所以造成了表征不明显,聪明的人们想到了在复坐标系表达姿态,这里面用到了超复数(一种双曲复数)的和,三个复数分别为i、j、k,他们有这样的关系:
以及交换变号的性质:
最后我们在每一个复数单位前增加一个系数,最后增加一个常数,就得到了四元数:
其中它的二范数只计算系数。关于计算的性质可以阅读下面链接的内容。同时我们的复数还可以表达一次90度的旋转,所以我们有了用四元数表达旋转的方法。当然,既然是复数就可以用欧拉公式变成三角值。
https://www.zhihu.com/tardis/bd/art/97186723
综上所述,我们得到了一种用四元数表达角度的方法,接下来我们看看如何求解角速度:
龙格库塔更新四元数
这个过程我们主要是求解$\frac{dQ}{dt}$,所以我们需要表达一下:
其中的C为三个复数组成的向量,导数等于0,平方等于-1。$\theta$为四元数利用欧拉公式计算的角度,我们将其转化为角速度就得到:
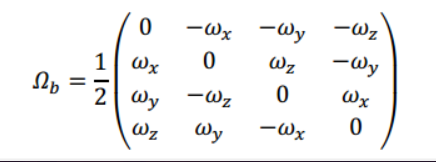
最后化简得到:
当然可以简单写作:
其中:
更新四元数的方法为:
代码
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 typedef struct {double q0;double q1;double q2;double q3;typedef struct {int16_t Accel_X_RAW;int16_t Accel_Y_RAW;int16_t Accel_Z_RAW;double Ax;double Ay;double Az;int16_t Gyro_X_RAW;int16_t Gyro_Y_RAW;int16_t Gyro_Z_RAW;double Gx;double Gy;double Gz;float Temperature;double KalmanAngleX;double KalmanAngleY;double KalmanAngleZ;double NormalAngleX;double NormalAngleY;double NormalAngleZ;void Quaternion_fromAxisAngle (Quaternion_t *Quat, MPU6050_t *data) {double cosRoll = cos (data->KalmanAngleX / 2.0 );double sinRoll = sin (data->KalmanAngleX / 2.0 );double cosPitch = cos (data->KalmanAngleY / 2.0 );double sinPitch = sin (data->KalmanAngleY / 2.0 );double cosYaw = cos (data->NormalAngleZ / 2.0 );double sinYaw = sin (data->NormalAngleZ / 2.0 );void Quaternion_fromAngularVelocity (Quaternion_t *Quat, MPU6050_t *data, double dt) {double p = data->Gx;double q = data->Gy;double r = data->Gz;0.5 * (-q * Quat->q1 - r * Quat->q2) - 0.5 * (Quat->q0 * p + Quat->q1 * q + Quat->q2 * r));0.5 * (p * Quat->q0 + r * Quat->q3) - 0.5 * (q * Quat->q0 + Quat->q2 * p + Quat->q3 * r));0.5 * (q * Quat->q3 - r * Quat->q0) - 0.5 * (Quat->q0 * r + Quat->q1 * p + Quat->q3 * p));0.5 * (q * Quat->q2 + r * Quat->q1) - 0.5 * (Quat->q0 * q + Quat->q1 * r + Quat->q2 * p));
卡尔曼法 在我的代码中使用到的就是卡尔曼滤波法。此法难度不大,但是过程较长,缺点是因为没有磁力计无法直接获取yaw值。如果对卡尔曼滤波公式不了解的可以阅读我的往期博客:卡尔曼滤波https://blog.minloha.cn/2023/02/16/%E5%8D%A1%E5%B0%94%E6%9B%BC%E6%BB%A4%E6%B3%A2/
公式:
公式转换为代码可以阅读下面的代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 typedef struct {double Q_angle; double Q_bias; double R_measure; double angle;double bias;double P[2 ][2 ];double Kalman_getAngle (Kalman_t *Kalman, double newAngle, double newRate, double dt) {double rate = newRate - Kalman->bias;0 ][0 ] += dt * (dt * Kalman->P[1 ][1 ] - Kalman->P[0 ][1 ] - Kalman->P[1 ][0 ] + Kalman->Q_angle);0 ][1 ] -= dt * Kalman->P[1 ][1 ];1 ][0 ] -= dt * Kalman->P[1 ][1 ];1 ][1 ] += Kalman->Q_bias * dt;double S = Kalman->P[0 ][0 ] + Kalman->R_measure;double K[2 ];0 ] = Kalman->P[0 ][0 ] / S;1 ] = Kalman->P[1 ][0 ] / S;double y = newAngle - Kalman->angle;0 ] * y;1 ] * y;double P00_temp = Kalman->P[0 ][0 ];double P01_temp = Kalman->P[0 ][1 ];0 ][0 ] -= K[0 ] * P00_temp;0 ][1 ] -= K[0 ] * P01_temp;1 ][0 ] -= K[1 ] * P00_temp;1 ][1 ] -= K[1 ] * P01_temp;return Kalman->angle;
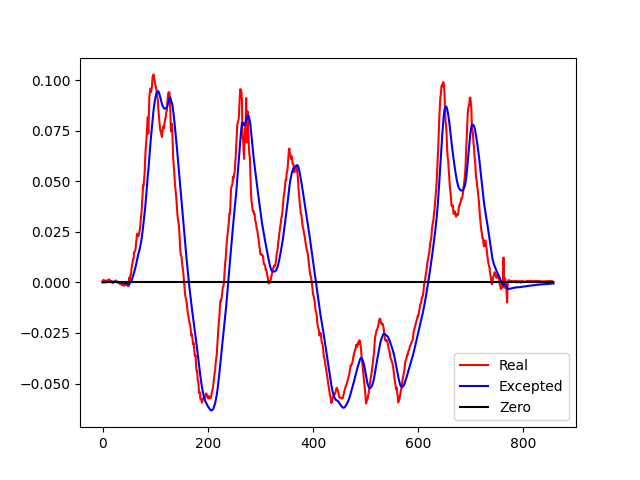
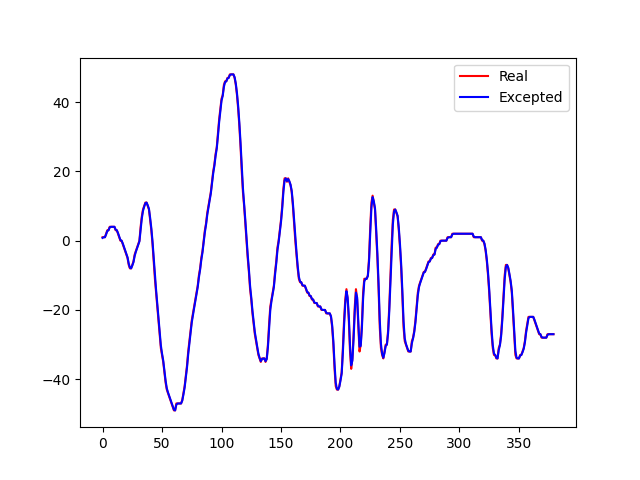
对于卡尔曼调参,这里给出一段python算法,只需要通过串口获取角度,保存到文件即可,然后使用下面的代码,让蓝色曲线更加平滑即可。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 import matplotlib.pyplot as pltwith open ('test.txt' , 'r' ) as file:for st in lines:"," )float (sp[0 ]))float (sp[1 ]))0.2 0.4 0.4 0.001 global angleglobal biasglobal Pglobal Sglobal Kdef Kalman (newAngle, newRate, dt ):global Q_angleglobal Q_biasglobal R_measureglobal angleglobal biasglobal Pglobal Sglobal K0 ][0 ] += dt * (dt * P[1 ][1 ] - P[0 ][1 ] - P[1 ][0 ] + Q_angle)0 ][1 ] -= dt * P[1 ][1 ]1 ][0 ] -= dt * P[1 ][1 ]1 ][1 ] += Q_bias * dt0 ][0 ] + R_measure0 ] = P[0 ][0 ] / S1 ] = P[1 ][0 ] / S0 ] * y1 ] * y0 ][0 ] -= K[0 ] * P[0 ][0 ]0 ][1 ] -= K[0 ] * P[0 ][1 ]1 ][0 ] -= K[1 ] * P[0 ][0 ]1 ][1 ] -= K[1 ] * P[0 ][1 ]return angleif __name__ == "__main__" :for i in range (len (normal_degree)):float (normal_degree[i])pass 0 0 0 , 0 ], [0 , 0 ]]0 0 , 0 ]20 for i in range (lim):pass for i in range (lim)]0 for i in range (lim)]"red" )"blue" )"black" )'Real' , 'Excepted' ,'Zero' ])pass
效果展示图:
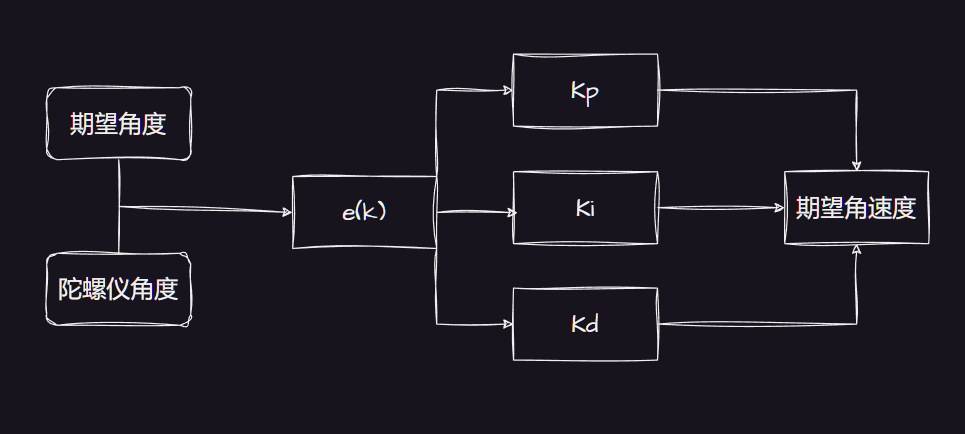
PID算法 提及控制算法,就不得不提到PID算法,这是一种闭环控制算法,输入参数只需要实际值和期望值即可,他共有两种格式:增量式和位置式
其中e为实际值与期望值的差,Kp,Ki,Kd为手工调节的参数。
一般都是使用位置式,相关代码如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 typedef struct {double P;double I;double D;double I_threshold;double Pout;double Iout;double Dout;double finnalOUT;double Error;double lastError;double integral;#define limit(value,max) if (value > max) value = max; double PID_Run (PID_t *PID,double target,double measure) {return PID->finnalOUT;
相关的流程图如下:
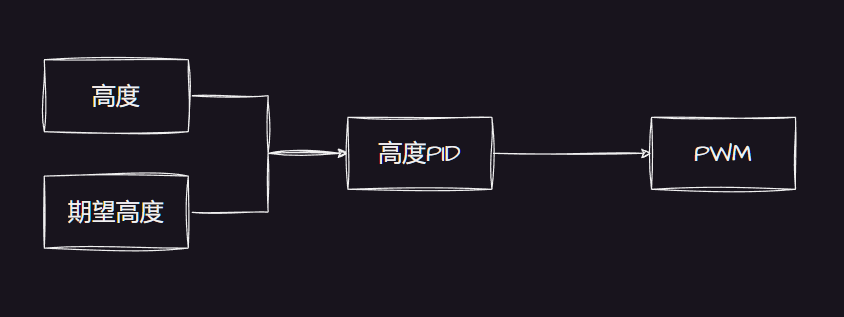
定高 我将定高放在PID后面是为了综合上面所有内容,这里我选择的获取高度的模块是气压计MS5611,他是IIC总线获取压强的模块,通过简单的计算就可以得到当前的高度。定高肯定需要有期望高度和实际高度,我们就可用PID控制输出的PWM。
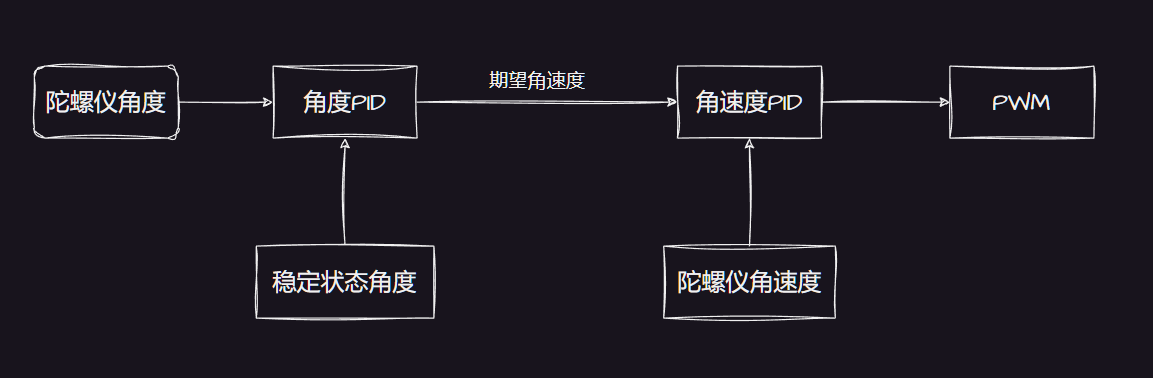
对于姿态稳定,我们可以用卡尔曼算法的姿态角计算角速度,然后计算PWM。也就是串级PID。
展示一下PID调参后的输出值。
总结 本次做一个四旋翼单纯只是玩一玩,展示一下图片后,本期博客就结束了。通过本文,读者可以清楚的了解四旋翼无人机的制作关键技术以及相关代码,读者可以自行采购物资进行设计一款自己的无人机。