1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
| import numpy as np
import cv2
import pcl
class stereoCamera(object):
def __init__(self):
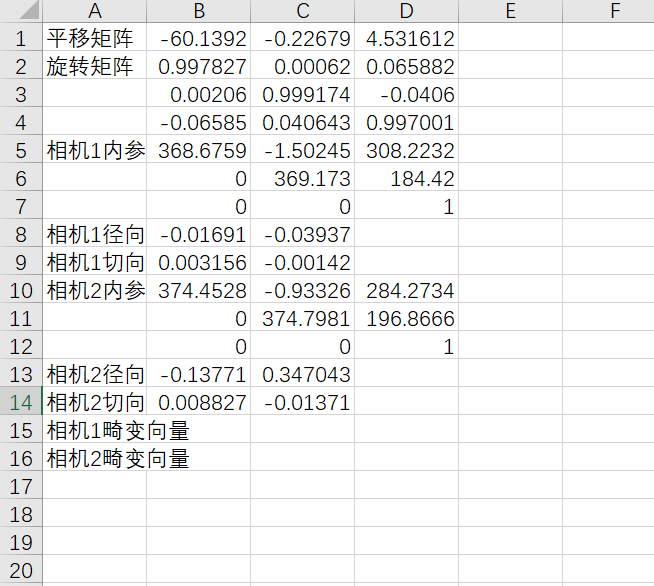
self.cam_matrix_left = np.array([[368.675898674749, -1.50245100976057, 308.223174252045],
[0, 369.172983810346, 184.420046614954],
[0, 0, 1]])
self.cam_matrix_right = np.array([[374.452750889965, -0.933263166338735, 284.273373661522],
[0, 374.79807385038, 196.866606672554],
[0, 0, 1]])
self.distortion_l = np.array([[-0.0169072200281734, -0.0393656307016634, 0.00315587347941657, -0.00142406381437646, 0]])
self.distortion_r = np.array([[-0.137714949099853, 0.347043476849145,
0.00882677131371728, -0.0137088374523692, 0]])
self.R = np.array([[0.997827201730772, 0.000619636065025224, 0.0658824068874556],
[0.00205989330848618, 0.999173532016587, -0.0405956864340979],
[-0.0658531117388919, 0.0406431909259702, 0.997001253111379]])
self.T = np.array([[-60.1391668881605], [-0.22679212052219], [4.53161173378334]])
self.focal_length = 859.367
self.baseline = 61
def preprocess(img1, img2):
if (img1.ndim == 3):
img1 = cv2.cvtColor(img1, cv2.COLOR_BGR2GRAY)
if (img2.ndim == 3):
img2 = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY)
img1 = cv2.equalizeHist(img1)
img2 = cv2.equalizeHist(img2)
return img1, img2
def undistortion(image, camera_matrix, dist_coeff):
undistortion_image = cv2.undistort(image, camera_matrix, dist_coeff)
return undistortion_image
def getRectifyTransform(height, width, config):
left_K = config.cam_matrix_left
right_K = config.cam_matrix_right
left_distortion = config.distortion_l
right_distortion = config.distortion_r
R = config.R
T = config.T
R1, R2, P1, P2, Q, roi1, roi2 = cv2.stereoRectify(left_K, left_distortion, right_K, right_distortion,
(width, height), R, T, alpha=0)
map1x, map1y = cv2.initUndistortRectifyMap(left_K, left_distortion, R1, P1, (width, height), cv2.CV_32FC1)
map2x, map2y = cv2.initUndistortRectifyMap(right_K, right_distortion, R2, P2, (width, height), cv2.CV_32FC1)
return map1x, map1y, map2x, map2y, Q
def rectifyImage(image1, image2, map1x, map1y, map2x, map2y):
rectifyed_img1 = cv2.remap(image1, map1x, map1y, cv2.INTER_AREA)
rectifyed_img2 = cv2.remap(image2, map2x, map2y, cv2.INTER_AREA)
return rectifyed_img1, rectifyed_img2
def draw_line(image1, image2):
height = max(image1.shape[0], image2.shape[0])
width = image1.shape[1] + image2.shape[1]
output = np.zeros((height, width, 3), dtype=np.uint8)
output[0:image1.shape[0], 0:image1.shape[1]] = image1
output[0:image2.shape[0], image1.shape[1]:] = image2
line_interval = 50
for k in range(height // line_interval):
cv2.line(output, (0, line_interval * (k + 1)), (2 * width, line_interval * (k + 1)), (0, 255, 0), thickness=2,
lineType=cv2.LINE_AA)
return output
def stereoMatchSGBM(left_image, right_image, down_scale=False):
if left_image.ndim == 2:
img_channels = 1
else:
img_channels = 3
blockSize = 3
paraml = {'minDisparity': 0,
'numDisparities': 128,
'blockSize': blockSize,
'P1': 8 * img_channels * blockSize ** 2,
'P2': 32 * img_channels * blockSize ** 2,
'disp12MaxDiff': 1,
'preFilterCap': 63,
'uniquenessRatio': 15,
'speckleWindowSize': 100,
'speckleRange': 1,
'mode': cv2.STEREO_SGBM_MODE_SGBM_3WAY
}
left_matcher = cv2.StereoSGBM_create(**paraml)
paramr = paraml
paramr['minDisparity'] = -paraml['numDisparities']
right_matcher = cv2.StereoSGBM_create(**paramr)
size = (left_image.shape[1], left_image.shape[0])
if down_scale == False:
disparity_left = left_matcher.compute(left_image, right_image)
disparity_right = right_matcher.compute(right_image, left_image)
else:
left_image_down = cv2.pyrDown(left_image)
right_image_down = cv2.pyrDown(right_image)
factor = left_image.shape[1] / left_image_down.shape[1]
disparity_left_half = left_matcher.compute(left_image_down, right_image_down)
disparity_right_half = right_matcher.compute(right_image_down, left_image_down)
disparity_left = cv2.resize(disparity_left_half, size, interpolation=cv2.INTER_AREA)
disparity_right = cv2.resize(disparity_right_half, size, interpolation=cv2.INTER_AREA)
disparity_left = factor * disparity_left
disparity_right = factor * disparity_right
trueDisp_left = disparity_left.astype(np.float32) / 16.
trueDisp_right = disparity_right.astype(np.float32) / 16.
return trueDisp_left, trueDisp_right
if __name__ == '__main__':
i = 3
video = cv2.VideoCapture(1)
video.set(cv2.CAP_PROP_FRAME_WIDTH, 2560)
video.set(cv2.CAP_PROP_FRAME_HEIGHT, 720)
if video.isOpened():
while True:
ret, frame = video.read()
if not ret:
print("Video End!")
break
iml = frame[0:720, 0:1280]
imr = frame[0:720, 1280:2560]
height, width = iml.shape[0:2]
config = stereoCamera()
map1x, map1y, map2x, map2y, Q = getRectifyTransform(height, width,
config)
iml_rectified, imr_rectified = rectifyImage(iml, imr, map1x, map1y, map2x, map2y)
line = draw_line(iml_rectified, imr_rectified)
disp, _ = stereoMatchSGBM(iml_, imr_, True)
points_3d = cv2.reprojectImageTo3D(disp, Q)
def onMouse(event, x, y, flags, param):
if event == cv2.EVENT_LBUTTONDOWN:
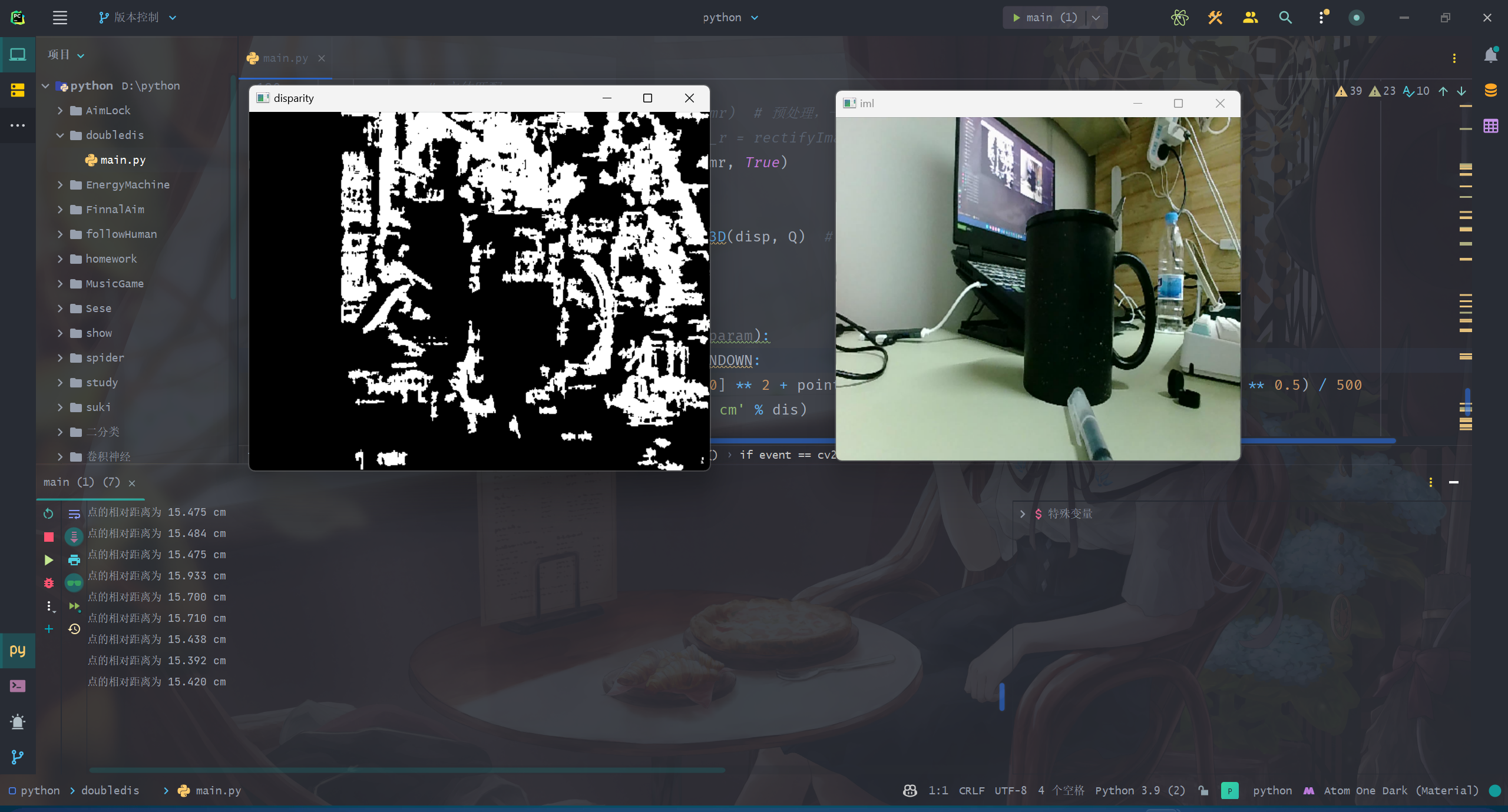
dis = ((points_3d[y, x, 0] ** 2 + points_3d[y, x, 1] ** 2 + points_3d[y, x, 2] ** 2) ** 0.5) / 500
print('点的相对距离为 %0.3f cm' % dis)
cv2.namedWindow("disparity", 0)
cv2.imshow("disparity", disp)
cv2.setMouseCallback("disparity", onMouse, 0)
cv2.namedWindow("iml", 0)
cv2.imshow("iml", iml)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
pass
pass
|